Library Compiler IRBP A
This walkthrough will guide you through the process of creating a batch file that calls the Library Compiler to build all 13
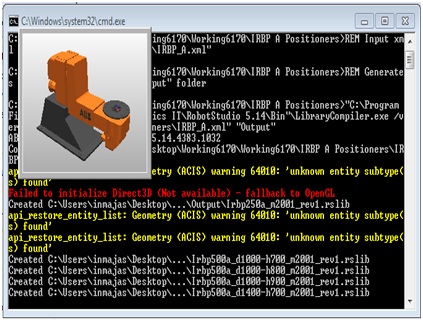
variants of the Positioner IRBP A. The batch file build.cmd executes the library compiler with LibraryTemplates.xml (IRBT_A.xml) as argument.
This will build all 13 libraries and outputs as .rslib files to the specified folder. This specified output folder must exist for a successful build.
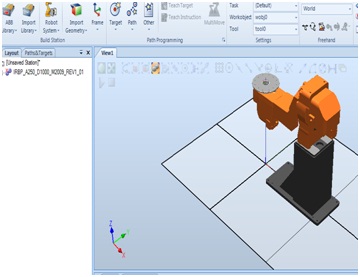
By default, output files of IRBP A positioner for RobotStudio can be found in installation path of RobotStudio at %ProgramFiles(X86)%\ABB\RobotStudio version\ABB Library\Positioners.
Download
Click here to download.
IRBP A
The LibraryCompiler.exe is located in %ProgramFiles(X86)\ABB\RobotStudio version\Bin\LibraryCompiler.exe.
Build.cmd calls this LibraryCompiler.exe with few arguments like Verbosity, Input XML and OutputFolder as shown below –

This ends up in 13 variants for IRBP A. Each variant is a separate library and is specified in its own .rsxml file. In the sample this can be seen from the file naming convention. The file LibraryTemplates.xml is used by the Library Gallery in RobotStudio in the following way. All variants are represented by one item in the gallery (IRBP A).

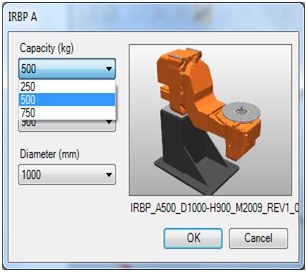
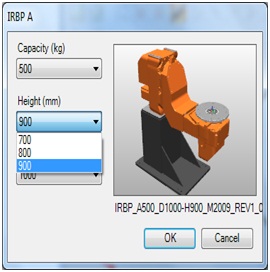
When this item is selected by the user, a dialog is rendered by RobotStudio, based on this XML file, and each variable parameter is presented as a combo box.
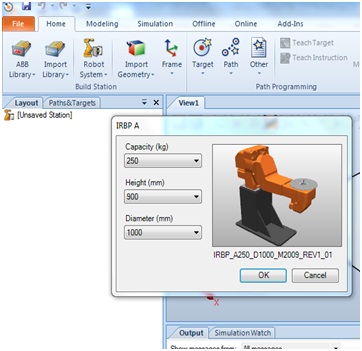
IRBP A comes in three handling weights 250, 500 and 750kg. There will be different combo boxes to select different variants.
The 500 and 750kg version comes in three different heights 700, 800 and 900 mm.
The 500 and 750kg version comes in two different diameters 1000 and 1450 mm.
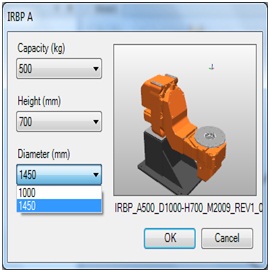
Depending on the choices on the combo boxes, the specific library will be selected and opened in RobotStudio.