Coordinate Systems
Overview
This section gives a introduction to coordinate systems that are often used in offline programming. In RobotStudio, you can use all coordinate systems described below, as well as user-defined coordinate systems, for relating objects and elements with each other.
Hierarchy
The coordinate systems relate to each other hierarchically, where the origin of each coordinate system is defined as a position in one of its ancestries. Below are descriptions of commonly used coordinate systems, starting at the top of the hierarchy.
World coordinate system
The world coordinate system represents the entire station or robot cell. This is the top of the hierarchy to which all other coordinate systems are related.
Task frame coordinate system
The task frame coordinate system is useful to define within a station or robot cell, in particular with multiple robots or mechanisms. One task frame can coordinate the placement of several mechanisms, whereas several task frames are suitable when working with MultiMove Independent.
Base frame coordinate system
Each robot in the station has a base coordinate system, which is always located at the base of the robot.
Tool-centre point (TCP) coordinate system
The tool center point coordinate system, also called TCP, is the center point of the tool. Several different TCPs may be defined for one robot. All robots have one predefined TCP at the robot’s tool mounting point, called tool0. When a program runs, the robot moves the TCP to the programmed position.
WorkObject coordinate system
The workobject normally represents the physical work piece. It is composed of two coordinate systems: the User frame and the Object frame, where the latter is a child to the former.
When programming a robot, all targets (positions) are related to the object frame of a workobject. If no other workobject is specified, the targets will be related to the default Wobj0, which always coincides with the base frame of the robot.
Using workobjects provides the chance to easily adjust robot programs with an offset, if the location of the work piece has been changed. Thus, workobjects can be used for calibrating offline programs.
If the placement of the fixture/work piece relative to the robot in the real station does not completely match the placement in the offline station, you simply adjust the position of the workobject.
Workobjects are also used for coordinated motions. If a workobject is attached to a mechanical unit (and the system uses the option for coordinated motions), the robot will find the targets in the workobject even when the mechanical unit moves the workobject.
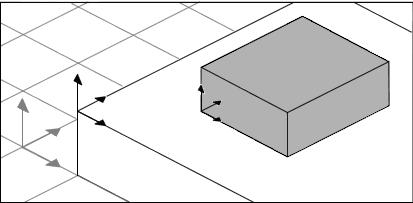
In the picture below the grey coordinate system is the world coordinate system, and the black ones are the object frame and the user frame of the workobject. Here the user frame is positioned at the table/fixture and the object frame at the workpiece.
Workobjects are also used for coordinated motions. If a workobject is attached to a mechanical unit (and the system uses the option for coordinated motions), the robot will find the targets in the workobject even when the mechanical unit moves the workobject.
Coordinate frames
Below is a representation of different coordinate frames when robot is holding the workpiece. In RobotStudio, by default the base frame coincides with the world frame unless it is moved.
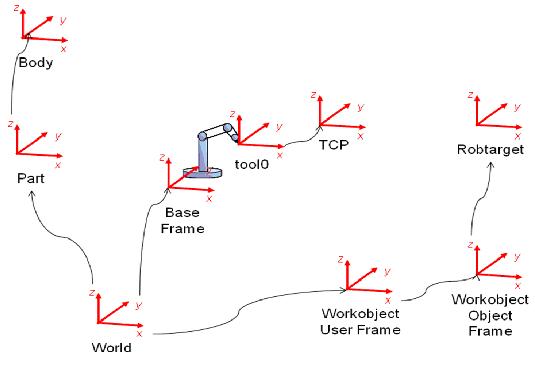
As defined in the above picture all frames have a Parent – Child relationship with the World cooordinate frame at the top of the hierarchy. Any object’s position and orientation can be modified (Transformed) with respect to various reference frames.