Overview
About this chapter
This chapter provides an overview of the run-time environment of custom applications, including illustrations of the software architecture of the PC SDK.
This explains how communication is carried out between the client and the robot controllers, as well as how clients access controller resources.
Software architecture
PC SDK provides APIs for developing PC-based (C#) applications for interacting with the robot controller.
It contains the public API layer, ABB.Robotics.Controllers.PC.dll which exposes the public APIs that can be used to develop
applications for performing various operations with the robot controller.
The following illustration shows the Software archtitecture of PC SDK. This Software archtitecture supports:
- Native 32-bit or 64-bit PC SDK applications
- RobotStudio Add-Ins (32-bit or 64-bit)
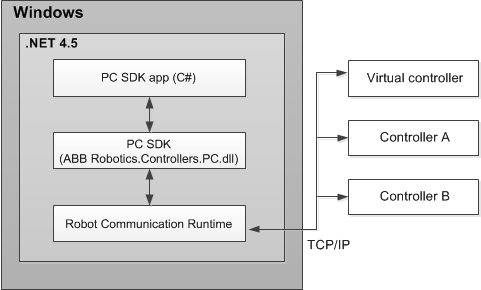
Software architecture before PC SDK Release 5.60
The following illustration shows the Software archtitecture of PC SDK before PC SDK Release 5.60. It shows the PC platform. Two PC SDK applications developed on top of the PC SDK. The PC SDK CAPI is the public API offering controller functionality. A PC SDK application can control many robot controllers on the network. All communication with these is done via the internal Robot Communication Runtime.

Controller API
The PC SDK offer controller functionality through the public application interface called Controller API. The interface can be seen as a specification of the controller services available.